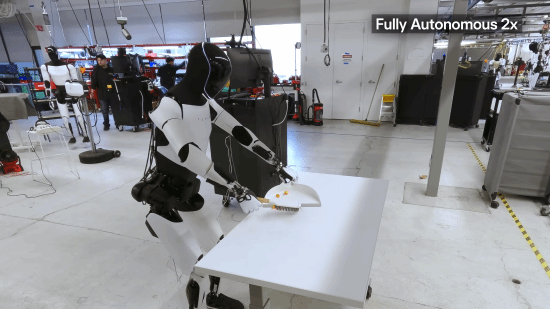
在得克萨斯超级工厂,埃隆•马斯克在接受采访时再次强调,Optimus 人形机器人将是公司未来最重要的产品之一。他展示了该机器人在家庭场景中的多种实用能力,例如清理垃圾、使用扫帚和吸尘器、撕开纸巾、搅拌锅中食物、打开柜门、拉上窗帘等日常事务。此外,它还能将一辆 Model X 的前连杆提起并放入手推车中。
令人瞩目的是,这些操作全部由一个神经网络完成。特斯拉 Optimus 研发团队通过向机器人输入人类执行任务的第一视角视频数据,使其能够直接学习并模仿人类动作。这一技术路径有望帮助机器人高效掌握新技能,并不断优化其表现。
特斯拉 Optimus 项目负责人 Milan Kovac 在社交平台透露了项目的最新进展与发展方向。他表示,团队正致力于让机器人具备从网络视频中学习人类行为的能力,所涉及的视频不仅限于第一人称视角,还包括第三人称或其他摄像设备拍摄的内容。
Kovac 指出:“我们已在这一领域取得重要进展,目前能够将大量从人类视频中提取的知识快速转化为机器人可执行的动作,虽然现阶段仅适用于第一人称视频。但这使我们能够在新任务中更快地部署机器人,相较依赖人工远程操作的方式效率更高。”
他进一步说明,借助这套方法,Optimus 正在展现出越来越多的新能力。这些技能可以通过语音或文字指令触发,并由机器人的统一神经网络协调执行。接下来,团队计划拓展至基于第三人称视角视频的学习,即利用互联网上的各类视频资源,同时尝试在真实环境或模拟环境中引入自我强化学习机制,以提升其稳定性和适应能力。
本文属于原创文章,如若转载,请注明来源:特斯拉人形机器人掌握多项实用技能https://news.zol.com.cn/986/9864634.html