中国科学院理化技术研究所近日宣布,成功开发出一种新型3D微纳机器人,其尺寸约为40微米,比人类发丝更细,却可在微观尺度下精准完成颗粒或细胞的抓取、运输与释放操作,形同一双高度灵活的“微观机械手”,为精准医疗等领域提供了全新的技术路径。
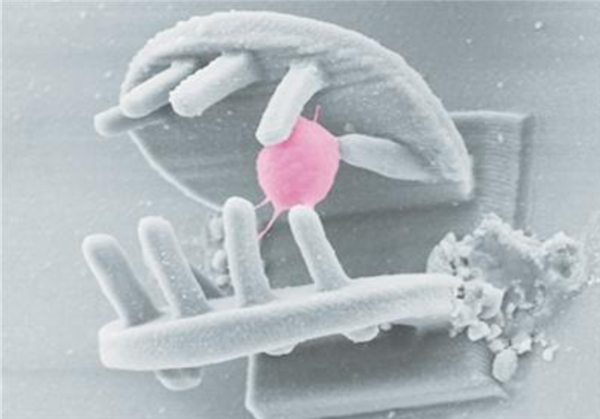
目前,多数微纳机器人受限于单一材料体系,在复杂环境中难以实现多刺激响应与多步骤协同操作。针对这一瓶颈,研究团队提出创新性结构设计——仿手型三维构型,整体呈现双手托举姿态,“手掌”部分具备开合能力。相比传统封闭式结构,该开放式设计更利于目标观测,并在释放颗粒时展现出更高的灵活性。
该结构的制备依托飞秒激光直写技术。该技术利用持续时间极短的激光脉冲(1飞秒等于10的负15次方秒),通过非线性光学效应,在材料内部实现纳米级精度加工,突破了传统光学衍射极限,可制造出比头发丝细上千倍的精细结构。研究人员如同以激光为笔,在不同功能材料上“绘制”组件,最终集成组装成完整的三维手型机器人。
该微型装置由两种智能材料协同构成:顶部为pH响应模块,充当“感应夹手”,能根据环境酸碱度变化自动开合;底部集成磁驱动模块,作为“微型马达”,可通过外部磁场实现远程操控,支持移动、旋转乃至翻转等多种运动模式。
在液体环境中运行时,当周围pH值发生变化,机器人的“手掌”即可像花瓣一样自然展开或闭合,实现对目标物的智能抓取与释放。实验表明,经过15轮以上的酸碱循环刺激后,机器人仍保持稳定响应能力,未出现结构疲劳或功能退化现象。
这一成果打破了传统微纳机器人仅具单向响应和单一功能的局限,实现了从环境感知到自主动作、从目标捕获到可控释放的全流程闭环操作。未来,此类机器人有望作为单细胞操作平台,广泛应用于细胞筛选、靶向给药及微创干预(如血栓清除)等医学场景。同时,在环境治理(如水中微塑料捕获)、微尺度制造以及基础科学研究方面亦展现出良好的应用前景。
本文属于原创文章,如若转载,请注明来源:中国科学院研发40微米仿生3D微纳机器人https://news.zol.com.cn/1080/10808860.html