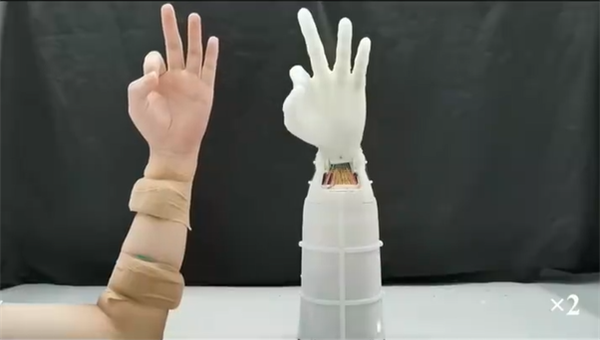
近日,中国科学技术大学及其合作团队成功研发出一款具备19个自由度的轻质仿生灵巧手。这款仿生手能够实现与人手相近的功能,不仅提升了人形机器人的操作灵活性,还为全球众多上肢截肢患者提供了手部功能重建和生活辅助的可能性。
人类的手拥有23个自由度,尽管其重量仅占人体总重的约1/150,却承担了全身54%的运动功能,是人类工作能力的重要体现。为此,研究团队采用高功重比的形状记忆合金(SMA)作为人工肌肉驱动,并结合仿生设计开发了一种类似肌腱的传动系统。这一设计不仅放大了SMA的驱动力,还有效降低了传动阻力。
通过在手指和手腕中嵌入23组传感单元,研究团队实现了关节的精准运动控制。此外,该仿生灵巧手集成了包含冷却模块的38组阵列式SMA驱动器,从而具备了19个自由度的灵活运动能力。得益于仿生设计和高密度集成技术,这款灵巧手重量仅为0.37千克,却能够完成梳头、写字、握手、递名片以及下棋等日常精细操作任务。同时,它还具有2.5千克的最大负载能力,能够满足患者的日常生活需求。
为进一步提升用户体验,研究团队将语音识别技术融入该仿生灵巧手,赋予其简单、直观且成本低廉的人机交互功能。这款灵巧手支持60种语言和20种方言,识别准确率高达95%,响应时间仅为毫秒级别,极大优化了用户操作感受。
在临床试验中,一位60岁的女性截肢患者仅用半天时间便熟练掌握了这款灵巧手的操作方法,并成功完成了多项标准假肢手功能评估实验中的任务,例如抓握物体、翻书和系扣等日常生活中的常见动作。更值得一提的是,这款仿生灵巧手还能操作剪刀、使用手机,并能精准复现传统的人手33种抓握动作,同时还可以完成6种更高难度的新抓握动作,展现了其广泛的应用前景。
本文属于原创文章,如若转载,请注明来源:中国科大研发19自由度仿生灵巧手助力机器人与残障辅助https://news.zol.com.cn/952/9523695.html